Assessing the Anafi drone
We flew the Anafi drone and collected data from tests run in the real world. The raw data is found inside the anafi_learned_run_flown folder. For this experiment, we were interested in a specific test suite inside the anafi_learned_run_flown folder. The specific raw data we were interested in is:
anafi_learned_run_flown/learned_anafi_sim_ANAFI_seed10_length10_nodes250_res4_beamwidth5_totaltime3600_simtime90_searchtype_kinematic_scoretype_learned/
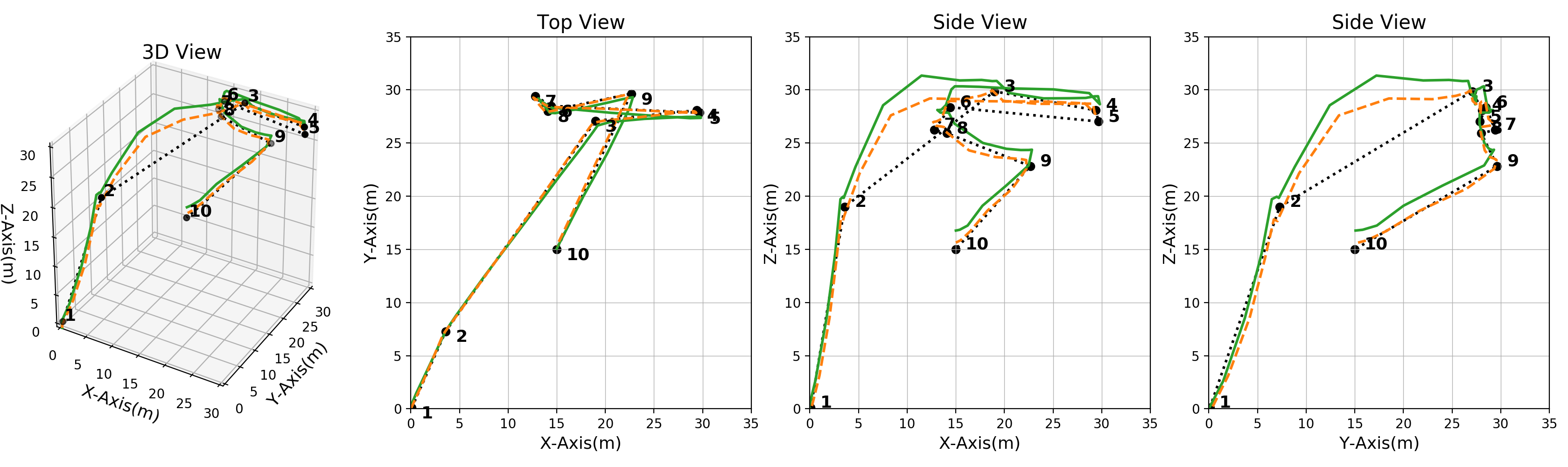
This raw data can be parsed using the provided script. This script parses the data and finds the test with the largest deviation. The test with the largest deviation is then displayed. The script can be run using the following commands in your terminal:
cd ~/Artifact/ReproducingResults
python3 RQ3_COMPARISON.py
The result of these commands is the test that resulted in the most significant deviation when flying the drone. The figure shows both the expected trajectory as well as the trajectory of the drone (Figure 8 in the paper).
Simulation Compared to Outdoors
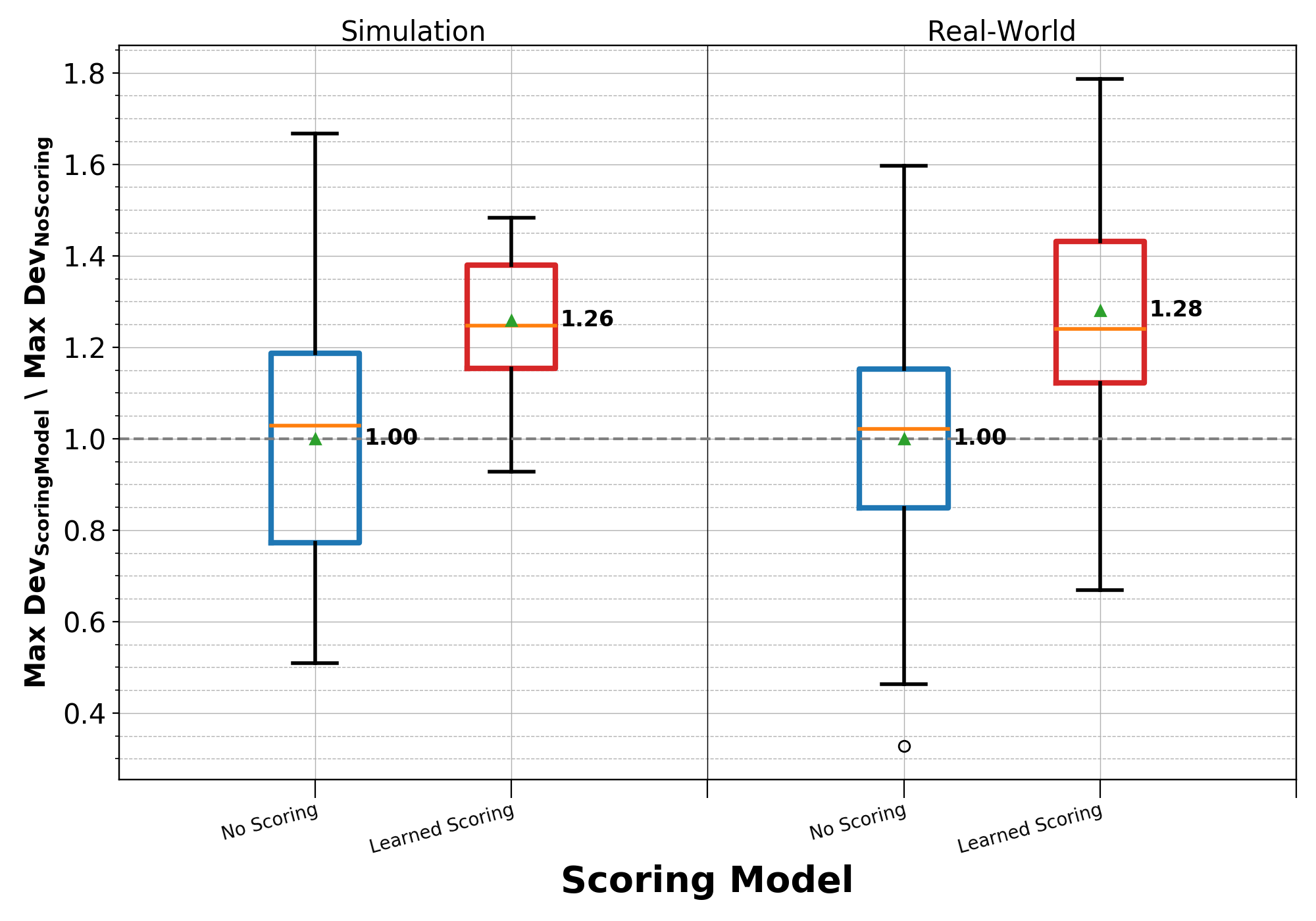
To assess the learned scoring models, we compared the deviation created when no scoring model was used to the deviation produced by a test set that incorporated a learned scoring model. The results are displayed as a ratio of mean maximum deviation of the no scoring model to the test set with a scoring model. The raw data for these tests are in the initial_run_flown folder, which used no scoring model. The folder anafi_learned_run_flown contains the Anafi learned scoring model test suite. More specifically, the raw data can be found in:
initial_run_flown/initial_ANAFI_seed10_length10_nodes250_res4_beamwidth5_totaltime7200_simtime90_searchtype_kinematic_scoretype_random/
anafi_learned_run_flown/learned_anafi_sim_ANAFI_seed10_length10_nodes250_res4_beamwidth5_totaltime3600_simtime90_searchtype_kinematic_scoretype_learned/
Using a provided script, we can parse the raw data and computes the ratio of the maximum deviation. To run this script, you can use the following commands in terminal:
cd ~/Artifact/ReproducingResults
python3 RQ3_ANAFI.py
The results from running this script can be seen in the output (Figure 9 in the paper).
Additional Analysis not Included in the Paper
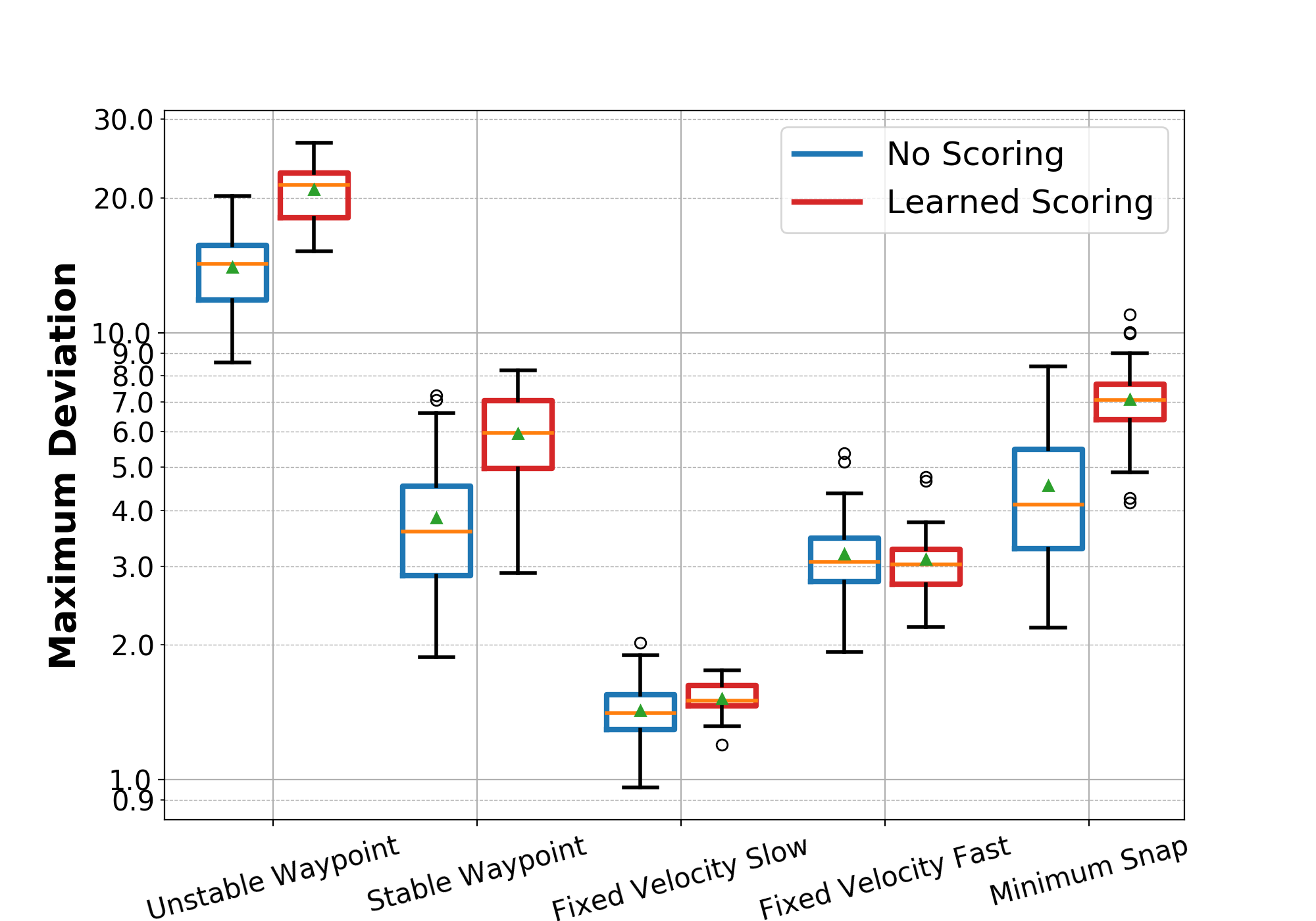
We show that you can perform a similar study on the learned controllers from the MIT Flightgoggles drone. As this requires a different set of data from the Anafi drone, we included this as an additional script. The raw datafor this script is found in the initial_run_flown as well as the learned_run_flown folders. More specifically, they can be found in:
~/Artifact/RawData/initial_run_flown
~/Artifact/RawData/learned_run_flown
The script computes the ratio of the maximum deviation from the learned scoring model to the initial test set for the Flightgoggles drone. To run the script run the following command in the terminal:
cd ~/Artifact/ReproducingResults
python3 RQ3_MIT.py
Using this command, you will get the following output, which shows the improvement of the learned scoring model.